





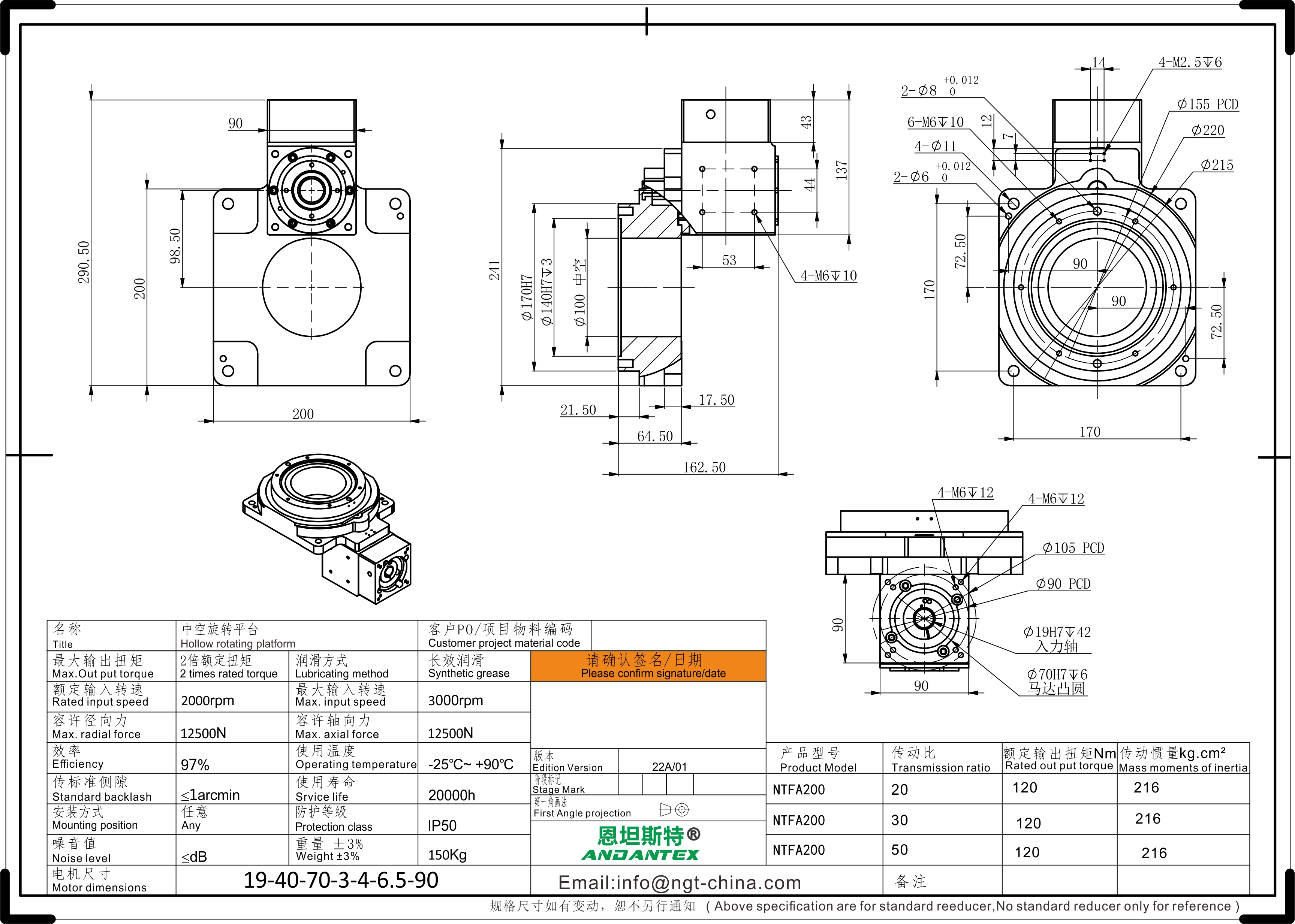
Specificazione
Features
A Piattaforma Rotazione Hollow Angle Right hè aduprata in i machini è l'equipaggiu di tecnulugia di superficia (SMT) in i seguenti modi:
Risparmio di spaziu: Per via di u so designu cavu, i cavi è i tubi d'aria ponu esse disposti in a piattaforma, risparmiendu spaziu in l'equipaggiu è migliurà a flessibilità di u layout generale.
Rotazione d'alta precisione: A piattaforma hè capace di movimentu rotativu d'alta precisione, chì hè adattatu per i prucessi SMT chì necessitanu un posizionamentu precisu, cum'è u piazzamentu, l'ispezione è a saldatura.
Movimentu multi-assi: Cumminatu cù altre piattaforme di muvimentu, a piattaforma rotativa cava à l'angolo drittu pò realizà un muvimentu multi-assi cumplessu per risponde à e diverse esigenze di prucessu.
Aumentu di a produtividade: Per mezu di a rotazione è u posizionamentu rapidi, u tempu di cambiamentu di l'equipaggiu hè riduttu, aumentandu cusì a produtividade.
Durabilità è Stabilità: Di solitu fattu di materiali d'alta resistenza, pò sustene grandi carichi è assicurà a stabilità in ambienti di travagliu di alta intensità.
Flessibilità di l'applicazione: pò esse largamente utilizatu in una varietà di equipaghji SMT, cum'è e macchine di piazzamentu, l'equipaggiu d'ispezione è e linee di assemblea automatizate.
In breve, a piattaforma rotante di l'angolo recto offre soluzioni efficaci, flessibili è precise in macchine è equipaghji SMT, prumove l'automatizazione è u sviluppu intelligente di a fabricazione elettronica muderna.
Applicazioni
In SMT (Surface Mount Technology) machini è equipaggiu, a realizazione di u muvimentu multi-assi hè essenziale per risponde à e richieste di assemblei cumplessi. A flessibilità è l'alta precisione di e tappe rotative cave à angolo retta li facenu ideali per realizà u muvimentu multi-assi. Queste tappe sò spessu usate in cumminazione cù altri tipi di tappe di muvimentu, cum'è slides lineari, tappe di elevazione, etc., per creà un sistema di movimentu multidimensionale. Cù sistemi di cuntrollu precisi è algoritmi di muvimentu, e plataforme rotative cave à l'angolo retta ponu esse coordinate per realizà movimenti, cumprese, ma micca limitati à, movimenti bidimensionali (pianu XY) è tridimensionali (spazio XYZ).
U sistema di cuntrollu ghjoca un rolu cruciale in u mecanismu di realizazione di u muvimentu multi-assi. A tecnulugia muderna di cuntrollu di u muvimentu utilizza servomotori è codificatori d'altu rendiment chì sò capaci di monitorà è aghjustà u statu di u stadiu in tempu reale. I servomotori furniscenu una rotazione precisa è u spostamentu, mentre chì i codificatori d'alta risoluzione furniscenu feedback nantu à a pusizione attuale. In u risultatu, cumminendu tappe rotative cave à angolo retta cù un software avanzatu di cuntrollu di muvimentu, l'ingegneri ponu programà traiettorie di muvimentu cumplesse è logica di cuntrollu per assicurà chì l'equipaggiu ottenga alta precisione è velocità in u muvimentu multi-assi.
U cuntenutu di u pacchettu
1 x prutezzione di cuttuni perla
1 x schiuma speciale per a prova di scossa
1 x cartone speciale o scatula di legnu










